RECore でモーターを動かしてみた
RECore はモーターを直接繋げるバッテリー付きマイコンボードで、Raspberry Pi や Arduino よりも簡単にロボットが作れます。 先日、Lチカして遊んでみました が、今度はモーターを動かしてみました。 L チカは Arduino にもできますが、モーターを直接繋げるマイコンボードは RECore だけです。 結論から言えば、特にトラブルもなくすぐに動いて、すごく簡単でした!
組み立て
家に手頃なモーターがなかったので、タミヤのパーツを買ってきました。全部でだいたい 1200 円くらい。
- タミヤ 楽しい工作シリーズ ボールキャスター - ヨドバシ.com
- タミヤ 楽しい工作シリーズ オフロードタイヤセット - ヨドバシ.com
- タミヤ 楽しい工作シリーズ ツインモーターギヤーボックス - ヨドバシ.com
写真のタイヤセットは 4 個セットのものですが、2 個しか使わないので、2 個セットを買うのがお得です。

説明書にしたがって、ギヤボックスとボールキャスターを組み立てます。 RECore の底面にはタミヤギヤボックス用の穴が空いているので、適当な位置にねじ止めし、ボールキャスターは両面テープでくっつけます。
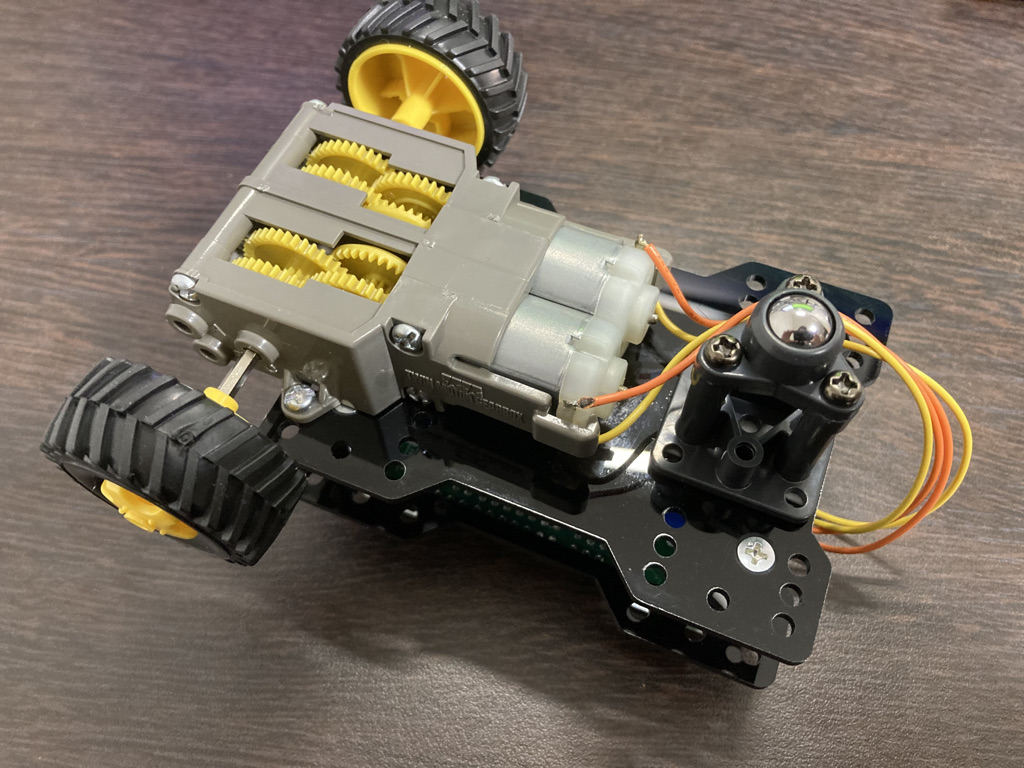
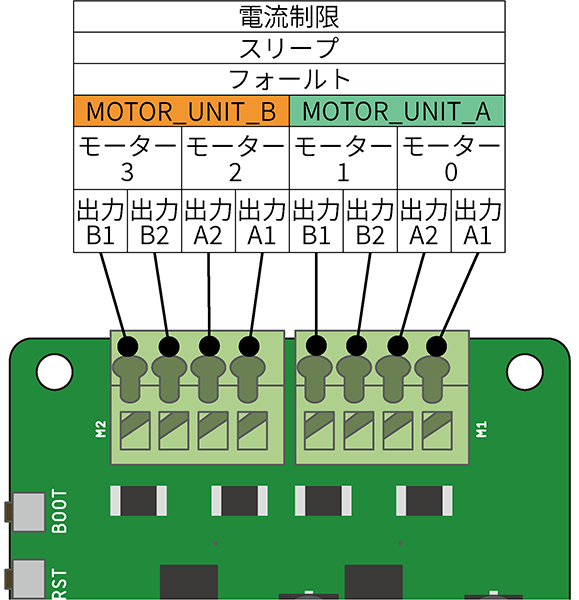
モーターのコードはこんな感じで Motor Unit A につなぎます。 どっちが正回転でどっちが逆回転なのかはわかりませんが、そこは動作させてみて考えることにしましょう。

プログラム
公式チュートリアルのモーターの内容にしたがって、プログラムを作ります。
ほとんどチュートリアルのままですが、速度を変えて方向転換するようにしてみます。
#include "RECoreLibrary.h" RECoreLibrary recore; void setup() { recore.setMotorType(MOTOR_UNIT_A, SINGLE_DC); // Unit A をシングルモードにする recore.setMotorCurrent(500); // 500mA } void loop() { recore.setMotorSpeed(0, 1.0); recore.setMotorSpeed(1, 1.0); delay(2000); recore.setMotorSpeed(0, 0.0); recore.setMotorSpeed(1, 1.0); delay(500); }
タミヤのモーターに何アンペア流せるのか全くわかりませんが、適当に 500 mA で設定しました。 実際どれくらいがいいんでしょうね?詳しい人教えて。
書き込み&実行
書き込む前に Arduino IDE でボードが RECore になっていることを確認します。
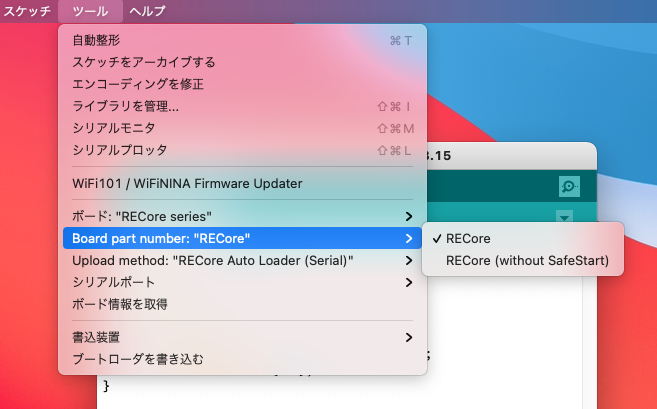
この状態だと SafeStart と言って、書き込んだ後に本体のタクトスイッチを押して、ユーザプログラムの実行を始める方式です。
RECore (without SafeStart) を選択すると、書き込んだ直後に実行が始まりますが、これだと USB ケーブルを引きずったまま走り出すので危険です。
書き込んだ後、RECore 本体の LED がフワフワ点滅するので、その状態でタクトスイッチを押すと、軽快に走り出します。
RECore 動いた! pic.twitter.com/OWZDBLnsZl
— あっきー(慢性五月病) (@ackey_65535) 2021年11月21日
感想
本当に数行のプログラムで簡単にモーターを動かすことができました! びっくりするほど簡単で、むしろ拍子抜けしてしまいますね。 これが Arduino ならモータードライバーを経由して繋ぐ必要がありますし、自走させるためには電池も積まないといけません。 それ考えると、かなり簡略化されていると思います。
RECore はロボット用のマイコンボードなだけあって、ハード・ソフト共にモーターを使うことが非常に楽です。 これで何か面白いもの作りたいですね!まだ、アイディアはないですが。。。